

электродвигатель 12v
Когда слышишь ?электродвигатель 12v?, многие представляют себе что-то простое, вроде детали от игрушки или вентилятора. Но в реальности, особенно в промышленных применениях или серьёзных системах автоматизации, это целый класс устройств с огромным разбросом по характеристикам, и здесь кроется первый подводный камень. Частая ошибка — выбирать только по напряжению и мощности, забывая про тип, момент, конструкцию подшипников и даже материал корпуса. Я сам на этом обжигался, когда лет десять назад пытался заменить мотор в одном агрегате на ?похожий? из другой партии — вроде и вольты, и ватты совпадали, а система перестала держать точность позиционирования. Оказалось, всё дело было в другом типе электродвигатель 12v — был коллекторный, а нужен был бесщёточный, да ещё и с определённой кривой момента. С тех пор всегда смотрю глубже.
Основные типы и где их реально применяют
Итак, если брать массово распространённые электродвигатель 12v, то тут два основных лагеря: коллекторные (щёточные) и бесщёточные (BLDC). Первые — дёшевы, просты в управлении (подал напряжение — крутится), но имеют щётки, которые изнашиваются, искрят и не любят пыли. Идеальны для задач, где не нужен долгий ресурс или высокая надёжность: простые насосы, приводы заслонок, некоторые бытовые приборы. Вторые — BLDC — сложнее, требуют специального контроллера (драйвера), но зато у них огромный ресурс, высокий КПД и они отлично управляются по скорости и моменту. Их ставят туда, где важна точность и долговечность: медицинские аппараты, робототехнические платформы, высококлассные системы вентиляции.
Но есть ещё один нюанс — шаговые двигатели на 12V. Их часто путают с BLDC, но принцип работы другой. Они хороши для точного позиционирования без обратной связи, но на высоких оборотах могут терять момент. Как-то раз заказывали партию для автоматического дозатора. В спецификациях всё сходилось, но на тестах при длительной работе на средних оборотах двигатели перегревались. Пришлось разбираться — оказалось, проблема была в неоптимальном соотношении индуктивности обмоток и рабочего напряжения 12V для требуемого диапазона скоростей. Пришлось искать другого поставщика с более подходящей электрической конструкцией.
Кстати, о поставщиках. Когда нужны не просто моторы, а готовые силовые модули или решения с редукторами, часто смотрю в сторону специализированных производителей. Например, ООО Шаньдун Мэнню Интеллектуальная Технология (их сайт — https://www.17drive.ru). Они как раз занимаются исследованиями и производством редукторов и двигателей. В их ассортименте можно найти сборки ?мотор-редуктор? на 12V, что очень удобно, когда нужно сразу получить нужное выходное усилие и скорость без самостоятельной подборки и соосной сборки. Это экономит массу времени на этапе прототипирования.
Ключевые параметры, на которые редко смотрят
Мощность в ваттах и напряжение — это только вершина айсберга. Для меня всегда критичными были параметры, которые часто прячут в конце даташита. Первое — это кривая зависимости момента от скорости (Torque-Speed curve). Именно она показывает, как поведёт себя электродвигатель 12v под нагрузкой на разных оборотах. Можно взять два мотора с одинаковой максимальной мощностью, но у одного момент будет резко падать после 3000 об/мин, а у другого — держаться почти до 5000. Для привода конвейера это может быть решающим фактором.
Второе — тепловой режим. Номинальный ток и ток стопорения (stall current). Многие дешёвые моторы имеют номинальный режим работы, скажем, 2А, но при этом кратковременно могут выдерживать 5А. А теперь представьте систему, где возможны частые пуски под нагрузкой. Если контроллер не имеет adequate current limiting, мотор будет постоянно работать в перегруженном тепловом режиме и в итоге сгорит. У меня был печальный опыт с приводом подъёмных ворот: мотор вроде бы подходил по мощности, но из-за частых пусков и отсутствия правильной системы управления перегрев вышел из строя через три месяца. Пришлось переделывать схему управления, ставить драйвер с плавным пуском и точным ограничением по току.
Третье — акустический шум и вибрации. Особенно для BLDC-двигателей. Качество подшипников, балансировка ротора, форма управляющих сигналов от контроллера (широтно-импульсная модуляция, ШИМ) — всё это влияет на шум. В проекте для лабораторного оборудования пришлось отказаться от одного, казалось бы, отличного по ТТХ электродвигатель 12v именно из-за высокочастотного писка, который появлялся при определённых скоростях. Производитель не смог решить проблему, сославшись на ?особенности конструкции?. Пришлось искать альтернативу.
Вопросы интеграции и управления
Самое интересное (и сложное) начинается, когда ты пытаешься заставить этот мотор работать в системе. Для коллекторного всё просто: источник питания, может быть, реостат или простой ШИМ-регулятор. Но его КПД на низких оборотах падает, регулировка нелинейная. Для BLDC уже нужен специализированный контроллер, который коммутирует обмотки по определённому алгоритму. И здесь важно понимать, какие интерфейсы управления нужны: аналоговый сигнал 0-5V, ШИМ, CAN, RS485? Например, в современных промышленных установках всё чаще требуется именно цифровой интерфейс для интеграции в общую сеть управления.
Очень рекомендую сразу продумывать вопрос обратной связи. Если нужно точное позиционирование или стабильность скорости при переменной нагрузке, без энкодера (датчика положения) или тахогенератора не обойтись. Многие BLDC-моторы идут сразу со встроенными датчиками Холла, но их разрешения хватает только для коммутации обмоток, а не для точного позиционирования. Для последнего нужен отдельный инкрементальный или абсолютный энкодер. Однажды мы пытались сэкономить, используя моторы со встроенными датчиками Холла для поворотного стола. Точность остановки была плюс-минус 3 градуса, что для задачи было неприемлемо. Пришлось в срочном порядке искать моторы с возможностью установки внешнего энкодера.
И не забывайте про механическую интеграцию. Посадочные размеры, тип вала (гладкий, шлицевой, с пазом), его диаметр и длина. Казалось бы, мелочь, но сколько раз сталкивался с ситуацией, когда мотор идеален электрически, но его вал на миллиметр короче, чтобы надёжно посадить муфту или шестерню. Или крепёжные отверстия имеют нестандартный шаг. Все чертежи и 3D-модели (если есть) нужно запрашивать у поставщика заранее. У того же ООО Шаньдун Мэнню Интеллектуальная Технология (www.17drive.ru), судя по опыту коллег, с документацией обычно порядок, что упрощает процесс проектирования узла.
Случай из практики: привод для мобильной платформы
Хочу привести пример, где все эти нюансы сошлись воедино. Задача была: разработать привод колёс для небольшой автономной мобильной платформы. Напряжение бортовой сети — 12V. Требования: хороший крутящий момент на низких оборотах для преодоления неровностей, возможность точного управления скоростью каждого колеса, высокая надёжность и защита от пыли/влаги.
Сначала рассматривали мощные коллекторные моторы с планетарными редукторами. Цена привлекательная. Но после тестов отказались — при интенсивном манёвре (частые реверсы, изменение скорости) щёточные узлы одного из моторов начали искрить и подгорать уже через несколько циклов тестирования. Ресурс явно не соответствовал требованиям.
Перешли на BLDC-моторы. Выбрали модель с номинальным моментом, казалось бы, с запасом. Но при езде по мягкому покрытию платформа иногда ?закапывалась? и останавливалась. Анализ показал, что в момент пиковой нагрузки (стопорения) контроллеры, которые мы изначально взяли, уходили в защиту по току слишком быстро, не давая мотору ?продавить? ситуацию. Пришлось искать и перепрограммировать контроллеры на более гибкие алгоритмы управления, позволяющие кратковременную перегрузку. Это тот самый случай, когда важен не только сам электродвигатель 12v, но и ?мозги?, которые им управляют.
В итоге остановились на связке BLDC-мотора с интегрированным планетарным редуктором и энкодером. Это было дороже, но решение оказалось работоспособным и надёжным. Кстати, редуктор в этой сборке — критически важная вещь. Именно он позволяет мотору работать в оптимальном диапазоне оборотов, выдавая высокий момент на выходе. При выборе таких сборок я всегда обращаю внимание на производителей, которые делают и моторы, и редукторы сами, так как это гарантирует лучшую соосность и оптимизацию пары. Вот здесь как раз к месту вспомнить про компанию, которая специализируется на этом, типа упомянутой ООО Шаньдун Мэнню Интеллектуальная Технология. Готовые мотор-редукторные узлы часто избавляют от множества головных болей.
Вместо заключения: простой чек-лист перед выбором
Не претендую на истину в последней инстанции, но исходя из своего опыта, перед тем как выбрать конкретный электродвигатель 12v, я задаю себе примерно такие вопросы, выходящие за рамки ?12V и 50W?. Каков реальный рабочий цикл? Постоянная работа или кратковременные включения? Какой пиковый момент и как долго он может требоваться? Нужна ли обратная связь по скорости или положению? В какой среде будет работать (температура, влажность, пыль)? Каковы требования к шуму и вибрации? Как мотор будет управляться и есть ли готовые совместимые контроллеры? И, наконец, что важнее: минимальная цена или общая стоимость влажения с учётом надёжности и простоты интеграции?
Ответы на эти вопросы сразу отсекают большую часть неподходящих вариантов. Иногда оказывается, что нужен не просто двигатель, а готовый приводной модуль. Иногда — что напряжение 12V является жёстким ограничением, и тогда приходится выжимать из этого параметра максимум, жертвуя, возможно, другими характеристиками.
Главное, что я для себя усвоил: в мире электродвигатель 12v нет универсальных решений. То, что идеально подошло для одного проекта, может полностью провалиться в другом, даже если задачи кажутся похожими. Поэтому всегда нужно погружаться в детали, тестировать в условиях, максимально приближенных к реальным, и не стесняться задавать сложные вопросы поставщикам. Их готовность предоставить подробные данные и поддержать на этапе тестов — тоже отличный индикатор качества будущего изделия.
Соответствующая продукция
Соответствующая продукция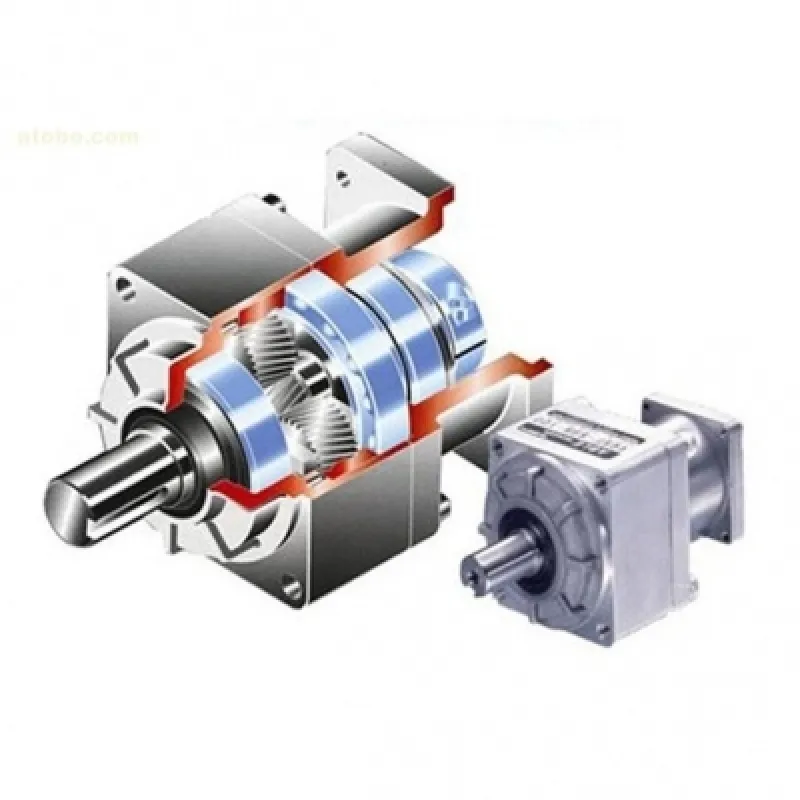





Самые продаваемые продукты
Самые продаваемые продукты-
 Прецизионный планетарный редуктор серий IB, IBR
Прецизионный планетарный редуктор серий IB, IBR -
 Мощный комбинированный редуктор серий H, B
Мощный комбинированный редуктор серий H, B -
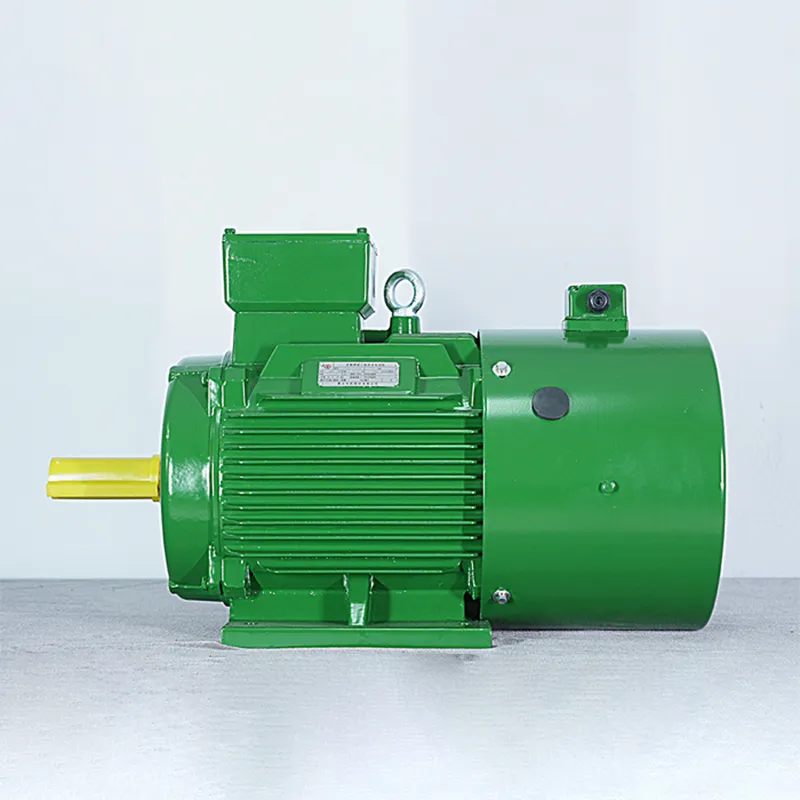 Частотно-регулируемый трехфазный асинхронный электродвигатель серии YVF2
Частотно-регулируемый трехфазный асинхронный электродвигатель серии YVF2 -
 Высоковольтный электродвигатель
Высоковольтный электродвигатель -
 Электродвигатель серии YE5
Электродвигатель серии YE5 -
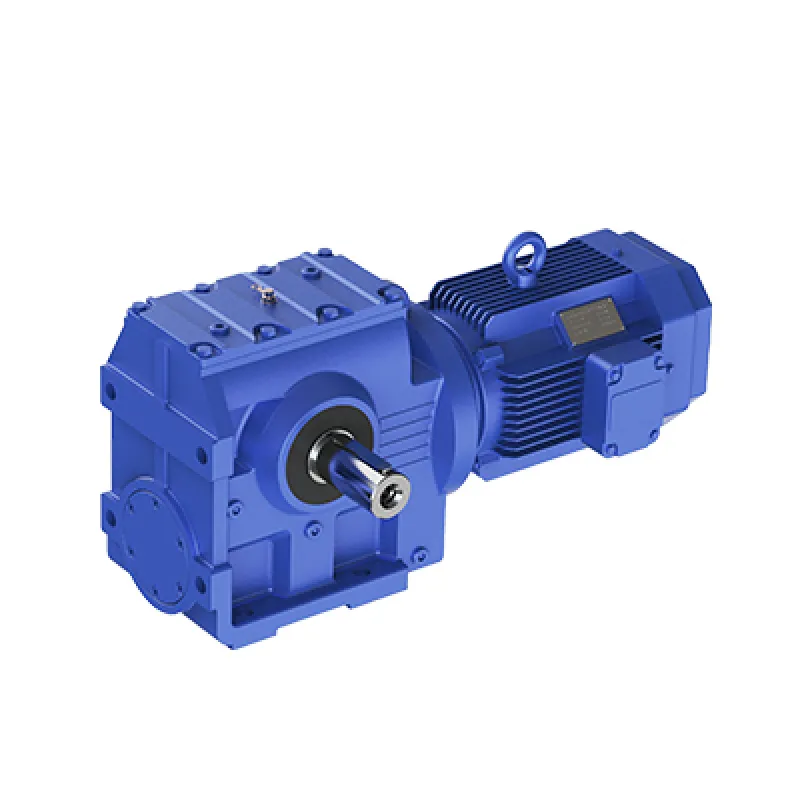 Редуктор серии S
Редуктор серии S -
 Редуктор серии R
Редуктор серии R -
 Взрывозащищенный частотно-регулируемый трехфазный асинхронный электродвигатель серии YBBP
Взрывозащищенный частотно-регулируемый трехфазный асинхронный электродвигатель серии YBBP -
 Взрывозащищенный трехфазный асинхронный электродвигатель серии YBX3
Взрывозащищенный трехфазный асинхронный электродвигатель серии YBX3 -
 Взрывозащищенный трехфазный асинхронный электродвигатель серии YB3
Взрывозащищенный трехфазный асинхронный электродвигатель серии YB3 -
 Прецизионный планетарный редуктор серий IE, IER
Прецизионный планетарный редуктор серий IE, IER -
 Электродвигатель стандарта NEMA
Электродвигатель стандарта NEMA



