

переменный и постоянный электродвигатель
Вот смотри, часто в технической литературе или даже в разговорах с заказчиками проскакивает это противопоставление — переменный и постоянный электродвигатель. Сразу возникает образ двух разных миров: асинхронники против коллекторных машин. Но на деле, когда годами занимаешься подбором и внедрением приводов, понимаешь, что ключевое — не просто тип тока, а то, как двигатель вписывается в конкретную систему, какие задачи решает и сколько потом будет стоить его обслуживание. Многие, особенно те, кто только начинает проектировать линии, зацикливаются на КПД из каталога или на цене за штуку, а потом удивляются, почему ресурс оказался в два раза меньше, или почему управление не такое плавное, как обещали. Это не про теорию, это про опыт, часто горький.
Асинхронники: надежность, которая может обернуться ограничением
Возьмем классику — асинхронный двигатель с короткозамкнутым ротором. Рабочая лошадка. Ставь его на конвейер, вентилятор, насос — и забудь. Но это в идеале. В реальности же, когда заказчик из ООО Шаньдун Мэнню Интеллектуальная Технология просит подобрать привод для нового станка, сразу возникает масса нюансов. Их сайт, https://www.17drive.ru, хорошо отражает суть: они не просто продают двигатели, а занимаются комплексно исследованиями и производством редукторов и приводных систем. И вот тут начинается самое интересное.
Например, был проект с линией розлива. Ставили стандартный асинхронник с частотником. Вроде все по учебнику: плавный пуск, регулировка скорости. Но технологи требовали точной остановки в определенной позиции — буквально до градуса. А у асинхронника с обычным частотным управлением при остановке всегда есть раскачка, особенно под переменной нагрузкой. Пришлось городить систему с внешним датчиком положения и сложными алгоритмами в ПЛК. Да, задача решена, но стоимость и сложность возросли. Получается, надежность самого двигателя — вещь бесспорная, но иногда его ?тупость? в управлении приходится компенсировать дорогой периферией.
Или другой аспект — момент на низких оборотах. В каталогах пишут про постоянный момент на определенном диапазоне. Но попробуй заставить его медленно и мощно тянуть пресс или поднимать тяжелую плиту с места. Без датчика обратной связи по моменту или векторного управления высокого класса начинаются рывки, перегрев. Многие думают, что купив ?крутой? частотник, они решат все проблемы. Но не всегда. Двигатель-то остается асинхронным, со своими физическими ограничениями. Это не недостаток, это особенность, которую нужно знать и заранее просчитывать.
Постоянный ток: точность, за которую платишь вниманием
Совсем другая история с двигателями постоянного тока. Когда-то они были королями в точном позиционировании и регулировке. Коллекторно-щеточный узел — это одновременно и гениально, и ахиллесова пята. Помню, как мы ставили такие моторы на старые советские станки для модернизации. Точность позиционирования была на уровне, плавность хода — прекрасная. Но цех — пыльный, графитовая пыль от щеток, постоянный контроль износа, замена. Для современного производства, где ценят безотказность и минимальное обслуживание, это часто неприемлемо.
Хотя, справедливости ради, есть ниши, где им нет замены. Например, некоторые специфичные подъемные механизмы или приводы прокатных станов, где нужен огромный пусковой момент на низких скоростях. Бесколлекторные двигатели постоянного тока (BLDC) — это уже следующий шаг. Их часто путают с асинхронными на переменном токе, но по сути управления они — моторы постоянного тока, просто электроника имитирует коммутацию. Мы как-то работали с инженерами из ООО Шаньдун Мэнню Интеллектуальная Технология над проектом компактного робота-манипулятора. Там как раз стояли BLDC-двигатели. Прелесть в том, что они дали и высокую плотность момента, и точное позиционирование без щеток. Но и здесь подводный камень — качество драйвера. Дешевый контроллер может свести на нет все преимущества двигателя, внося пульсации и перегрев.
Поэтому, когда на https://www.17drive.ru говорят про разработку двигателей, я всегда мысленно добавляю: ?…и систем управления к ним?. Это неразрывная связь. Можно взять самый совершенный постоянный электродвигатель BLDC, но если алгоритмы управления хромают, то ни о какой плавности и точности речи не идет. Видел случаи, когда из-за плохой настройки ШИМ двигатель пел так, что его было слышно в соседнем цеху, и вибрация разбивала подшипники за полгода.
Синхронные машины на переменном токе: гибридный подход
Сейчас все чаще говорят о синхронных двигателях с постоянными магнитами (PMSM), которые питаются переменным током. Это, пожалуй, самый яркий пример стирания граней между ?переменным? и ?постоянным?. По конструкции — ротор с магнитами, как у некоторых DC-моторов. По питанию — переменный ток, как у асинхронников. А по характеристикам — часто лучше обоих: высокий КПД, отличная управляемость, компактность.
Но и здесь не без ложки дегтя. Во-первых, цена. Магниты, особенно редкоземельные, делают такой двигатель значительно дороже. Во-вторых, есть риск размагничивания при перегреве или коротком замыкании. Был у меня печальный опыт на испытательном стенде. Двигатель PMSM работал на предельных нагрузках в жарком помещении. Система защиты от перегрева сработала с задержкой — и все, падение момента на 15-20% безвозвратно. Ротор пришлось менять. Асинхронник в такой ситуации просто остыл бы и дальше работал.
Именно поэтому компании, которые занимаются комплексными решениями, как та же ООО Шаньдун Мэнню Интеллектуальная Технология, часто предлагают не просто двигатель, а технико-экономическое обоснование. Для одной задачи выгоднее взять дорогой PMSM, потому что он сэкономит энергию за год и окупится. Для другой — надежнее и дешевле будет асинхронник с хорошим редуктором. Ключ — в понимании полного жизненного цикла системы, а не в сиюминутной экономии на закупке.
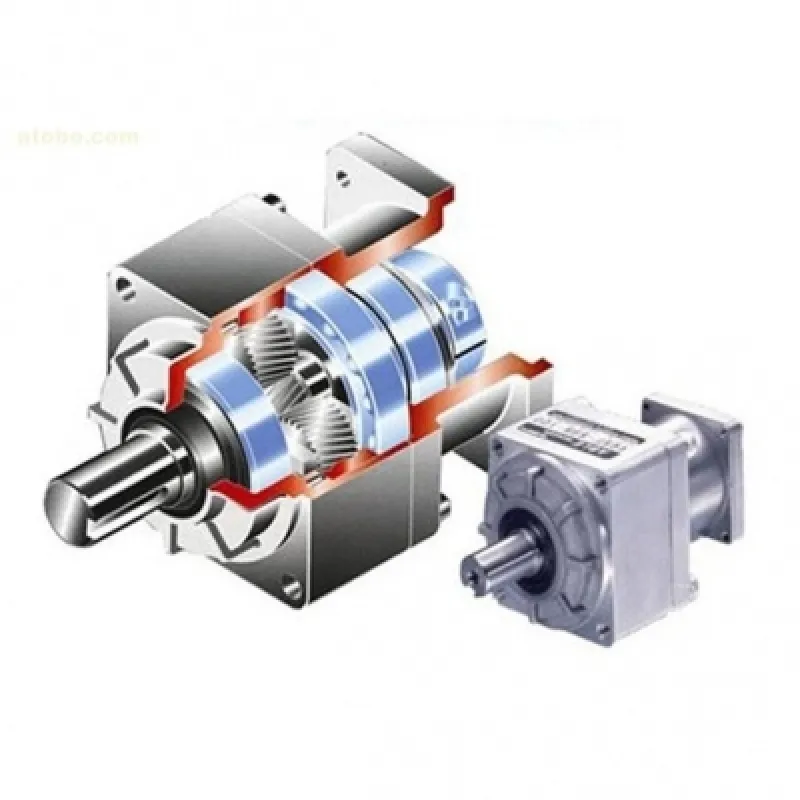
Редуктор как уравнитель возможностей
Часто спор между типами двигателей снимает правильно подобранный редуктор. Это моя любимая тема. Можно взять не самый дорогой или не самый мощный переменный электродвигатель, но, подобрав к нему редуктор с нужным передаточным числом, КПД и люфтом, получить блестящий результат. И наоборот, самый навороченный серводвигатель можно убить редуктором с большим мертвым ходом.
В описании деятельности ООО Шаньдун Мэнню Интеллектуальная Технология не зря исследования и производство редукторов стоят на первом месте. На практике часто бывает так: приезжаешь на объект, смотришь на проблему — вибрация, неточность. Все грешат на двигатель, меняют его, а проблема остается. А потом оказывается, что редуктор, который стоит между мотором и нагрузкой, имеет критический износ или был подобран не по моменту. Двигатель и редуктор — это одна система. Их нужно рассматривать вместе, и часто именно редуктор диктует, какой тип привода будет работать эффективнее.
Например, для тяжелого поворотного механизма крана. Можно поставить мощный низкооборотный гидромотор (это своя история), а можно — высокооборотный асинхронный или постоянного тока с планетарным редуктором. Выбор будет зависеть от доступности техобслуживания на объекте, требований к плавности хода и, конечно, бюджета. Тот, кто продает просто моторы, предложит то, что есть в наличии. Тот, кто, как команда с 17drive.ru, смотрит на систему в целом, сначала задаст кучу вопросов про условия эксплуатации, режимы работы, доступ к сети.
Мысли вслух о будущем и практических компромиссах
Куда все движется? На мой взгляд, четкое разделение на переменный и постоянный ток для двигателя будет все больше размываться. Будущее за гибридными системами и интеллектуальным управлением. Двигатель становится ?исполнительным органом?, а мозг — это продвинутый контроллер, который может работать с разными типами машин, адаптируя алгоритмы под конкретную ситуацию. Уже сейчас частотники умеют работать и с асинхронниками, и с синхронными моторами, нужно только правильно задать параметры.
Но в этом и кроется новая проблема. Раньше инженер на заводе знал: вот этот мотор постоянного тока, для него вот этот тиристорный привод. Все предсказуемо. Сейчас же одна и та же ?черная коробка? частотника может управлять разными двигателями, но для этого нужны глубокие знания. Недостаточно просто подключить провода, нужно провести автонастройку, замерить параметры, иногда вручную скорректировать коэффициенты. Без этого даже лучший двигатель не раскроет потенциал.
Поэтому, возвращаясь к началу. Когда тебе нужно выбрать переменный и постоянный электродвигатель, перестань думать об этом как о выборе между двумя лагерями. Сначала определи задачу до мелочей: какой нужен момент, скорость, точность, какова нагрузка (постоянная, ударная), в какой среде работать, как часто будут останавливать и запускать, какое качество сети. Потом посмотри на это как на систему: двигатель + привод + редуктор + система управления. И только тогда решение станет очевидным. Иногда это будет асинхронник, иногда BLDC, иногда PMSM. А иногда, как это ни парадоксально, лучшим решением окажется старый добрый двигатель постоянного тока с щетками, потому что его просто и дешево обслуживать в данной конкретной глубинке. Все решает практика, а не красивые графики в каталоге.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
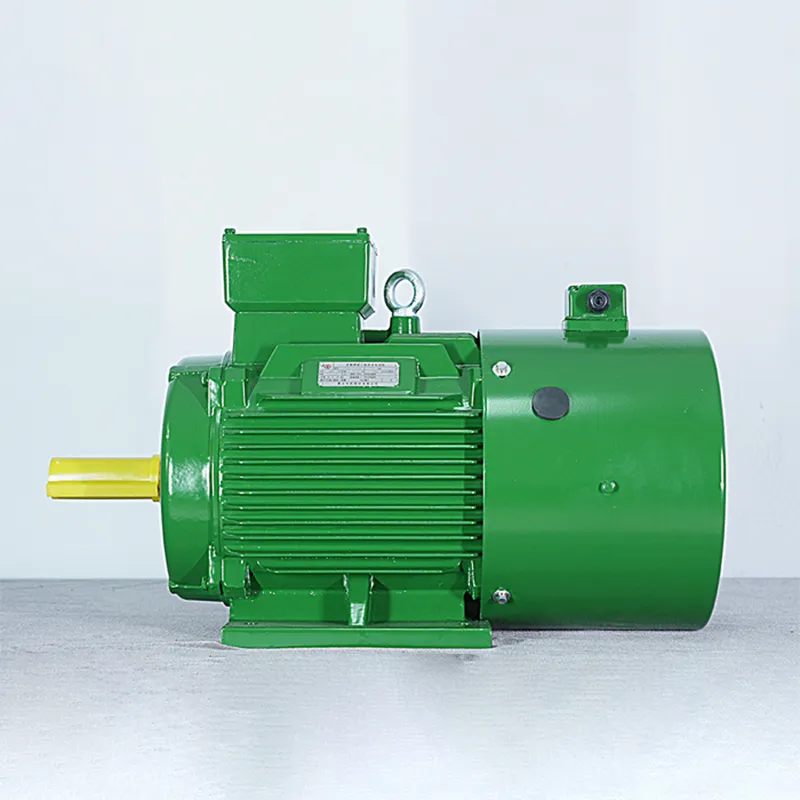
 Сверхвысокоэффективный трехфазный асинхронный электродвигатель серии YE3
Сверхвысокоэффективный трехфазный асинхронный электродвигатель серии YE3 -
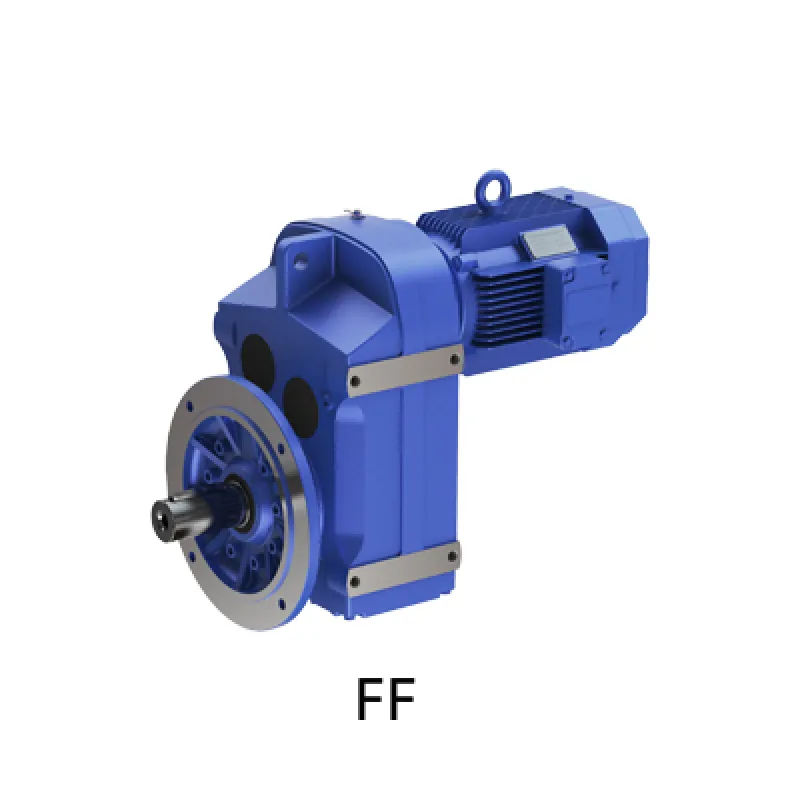
 Косозубый планетарный редуктор серии VR
Косозубый планетарный редуктор серии VR -
 Взрывозащищенный трехфазный асинхронный электродвигатель серии YBX3
Взрывозащищенный трехфазный асинхронный электродвигатель серии YBX3 -
 Трехфазный асинхронный электродвигатель серии YE4
Трехфазный асинхронный электродвигатель серии YE4 -
 Трехфазный асинхронный электродвигатель серии HuE с подвижными лапами
Трехфазный асинхронный электродвигатель серии HuE с подвижными лапами -
 Прецизионный планетарный редуктор серий PN, WPN
Прецизионный планетарный редуктор серий PN, WPN -
 Прецизионный планетарный редуктор серии PW
Прецизионный планетарный редуктор серии PW -
 Частотно-регулируемый трехфазный асинхронный электродвигатель серии YVF2
Частотно-регулируемый трехфазный асинхронный электродвигатель серии YVF2 -
 Прецизионный планетарный редуктор серий PF, WPF
Прецизионный планетарный редуктор серий PF, WPF -
 Электродвигатель стандартной серии IE
Электродвигатель стандартной серии IE -
 Пылевзрывозащищенный трехфазный асинхронный электродвигатель серии YFBX3
Пылевзрывозащищенный трехфазный асинхронный электродвигатель серии YFBX3 -
 Электродвигатель серии YE5
Электродвигатель серии YE5



